As we wrote
earlier , one of the priorities of our laboratory is industrial exoskeletons.
When we hear the word exoskeleton before our eyes, the image of Robert Downey Jr. Invariably stands up. He is dressed in a purple-gold armor of the Iron Man, soaring into the clouds and throwing the enemies of humanity to the right and left.
The exoskeletons existing and being developed today are not yet capable of lifting multi-ton loads, flying in the stratosphere and developing supersonic speeds, but can this not be required of them? ..

What is exoskeleton?
International Standard
ISO 13482: 2014 (en) Robots and robotic devices include exoskeletons to the category of helper robots attached to the human body during use, which are more commonly referred to as clothing robots. The US National Research Laboratory conducted a
survey among developers and operators of robotics on the subject of what is “dressed robotics”, during which all respondents agreed on the following:
- These are wearable robotic tools, the elements of which are attached directly to the human operator;
- These are robotic tools that physically unload the operator, provide him with physical support, increase his physical abilities.
Thus, the exoskeleton is a wearable (worn on a person) mechanical device or a software-mechatronic complex with elements of anthropomorphic structures, designed to increase the physical abilities of a person through synchronous duplication and support the motor activity of the latter. Speaking about the multiplication of physical abilities, we mean not only the Olympic “Faster! Above! Stronger! ”, But also healthier, tougher, more efficient, technically correct. The exoskeleton is designed to help a person overcome some of his existing physiological barriers, thus combining intelligence, creativity, adaptability and learning of a human worker with the strength, endurance, and accuracy of a robot worker. In this section, the exoskeleton is also a kind of collaborative robotics.
The history and evolution of exoskeleton

The progenitor of the exoskeleton can be considered as an elastip. The elastiped device, designed to facilitate walking, running and jumping, was intended for military use. The author of this invention is the Russian inventor Nikolai Aleksandrovich Yagn (1849 - 1905). At the end of the XIX century, he developed and patented several modifications of the passive exoskeleton
"Elastip" .
The first attempt to develop a power exoskeleton was made by General Electric specialists in the early 60s of the 20th century. The project called “Hardiman” was commissioned by the US Department of Defense. In the course of the project, a two-pediatric platform and a manipulator with an electro-hydraulic transmission were developed, the design of which was to provide the possibility of lifting the load with a total weight of up to 680 kg.
Elastolyp N. A. Yagna, sketchA significant drawback to the design of the exoskeleton was the vibrations arising in the process of functioning, which caused the device to repeatedly tilt during the tests. Testing with the involvement of the operator was not conducted.
As a result, research has focused on the development of one of the exoskeleton manipulators. Despite the fact that the developers managed to achieve a target load capacity of 750 pounds (340 kg), the weight of the device itself was almost three-quarters of a ton, which was more than twice the weight of the payload being lifted.
It was not possible to overcome the design flaws of the device, as a result, in 1971 the project "Hardiman" was closed due to the lack of prospects for its further development [https://en.wikipedia.org/wiki/Hardiman].
Right: prototype of the Hardiman exoskeleton.In the 1970s, the Yugoslav scientist Miomir Vukobratovich created a pneumatic-driven exoskeleton prototype that was supposed to help paralyzed people get back on their feet. In the 80s, Vukobratovich presented his exoskeleton to the USSR. Russian and European scientists subsequently took the Vukobratovich project as a basis for creating their technologies. Thus, in the early 1980s, an exoskeleton for persons with disabilities from the NN Priorov Central Institute of Traumatology and Orthopedics appeared.
Interestingly , the famous Russian project EkzoAtlet is being done by scientists who have just studied the Vukobratovich project at Moscow State University.
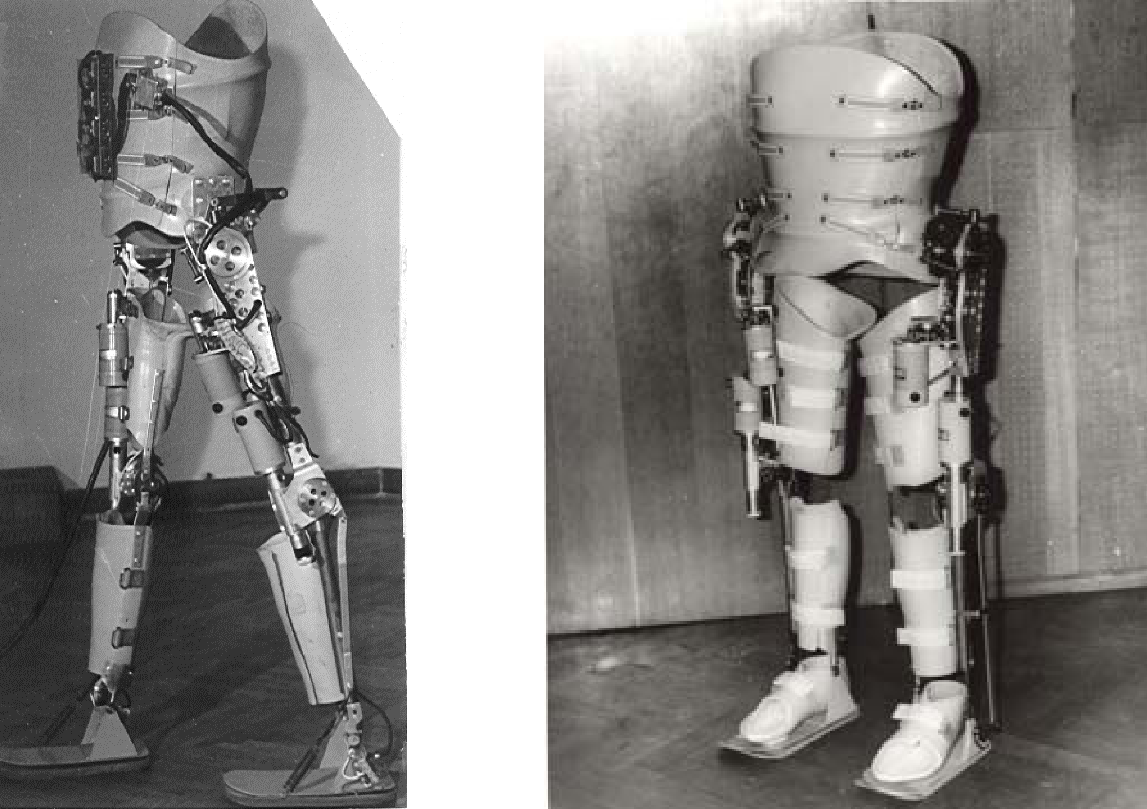 The exoskeleton of Miomir Vukobratovich
The exoskeleton of Miomir VukobratovichThe lack of compact and safe energy sources, the lack of effective power components and controls significantly hampered the development of exoskeletons.

It was not until the mid-2000s that the idea of creating a “power suit” began to be realized. For example, the United States Defense Advanced Research Projects Agency (DARPA) initiated the development of exoskeletons in 2001 as part of the Exoskeletons for Human Performance Augmentation program. The agency funded $ 50 million to various participants in a five-year program. The program developed the Wearable Energetically Autonomous Robot (WEAR) system from Sarcos Research from Salt Lake City, Utah, which as a result of further development and modernization created the full-size
XOS2 power
exoskeleton , represented by defense giant Raytheon (bought Sarcos Research in 2007 year) in September 2010.
Source - Army TechnologyCurrently, the exoskeleton theme is becoming one of the most dynamically developing areas of service robotics; dozens of scientific organizations and industrial enterprises in a number of countries of the world, including the USA, Japan, Israel, Germany, China, France, New Zealand, Norway, are developing their own exoskeleton complexes. , UK, South Korea, Italy and Russia.
Why industrial exoskeletons?
The analysis of world experience allows us to conclude that at the moment there are three key areas of application of exoskeleton modules and complexes based on them:
- military exoskeletons;
- rehabilitation exoskeletons and exoskeletons to compensate for the lack of mobility of persons with disabilities;
- exoskeletons for use in industry.
The greatest interest today is precisely the direction of industrial exoskeletons, and there are several reasons.
Reason # 1: Market Aspect
Wearable robotic tools designed for use in industrial production are becoming the fastest growing area of commercial use of exoskeleton technology.
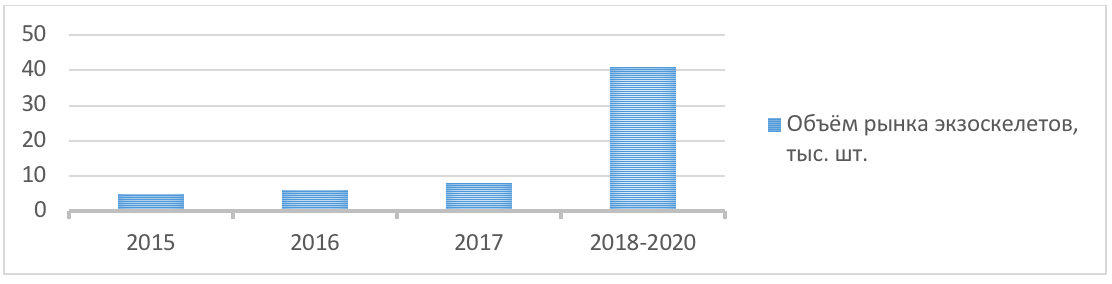 The dynamics of the world market of exoskeletons in the period from 2015 to 2017 with a forecast for 2018-2020. according to IFR
The dynamics of the world market of exoskeletons in the period from 2015 to 2017 with a forecast for 2018-2020. according to IFR
Segment forecast of the development of the market of exoskeletons by 2023-2024. compiled from
Global Markets Insight and
Markets & Markets research data.
Exoskeletons for work and industry can be used on construction sites, in dry docks, in factories, warehouses and even in surgical rooms. The introduction of such devices provides a solution to three major business problems:
a) an increase in labor productivity and a reduction in the laboriousness of performing manual manufacturing operations;
b) reduction of social and compensation payments related to the occurrence of occupational injuries and occupational diseases of employees of production units;
c) providing additional motivation of employees, achieved through the creation of more comfortable working conditions.
In the most recent presentation of the Wearable Robotics Association, Dr. Joseph Hitt
described the exoskeletons for production and construction as “low-hanging fruits” of the market for exoskeleton solutions, which is quite true, because compared to rehabilitation or military exoskeletons, such direction as industrial power suits has a number of significant benefits:
a) the range of consumers is extremely wide and not limited to a specific specific group of potential buyers; in addition, the target audience includes many of the largest industrial corporations with a high level of solvency, which in the future will be able to buy millions of industrial exoskeleton units for their workers;
b) today there are no clear leaders and generally recognized authorities in this niche;
c) there are no administrative and legal barriers to market entry;
d) more mild performance requirements (in comparison, for example, with similar solutions for military use), no restrictions associated with the component base used, as a result, lower costs for both development and manufacturing.
Reason number 2: the social aspect
Even in modern high-tech manufacturing enterprises, within the framework of production processes, there are many operations that are rather difficult to automate. According to the European Foundation for the Improvement of Living and Working Conditions, up to 64% of highly skilled workers spend almost three quarters of their working time on lifting and carrying operations of various goods. Specialists in production constantly have to resort to the use of manual labor, as a result of which they are exposed to harmful factors that increase the likelihood of injury, primarily the development of various musculoskeletal disorders, which remain among the most common occupational diseases in the European Union. This in turn leads to higher costs for the maintenance of workers during periods of their disability and reduced productivity in the enterprise as a whole. The Work Foundation estimates that today about 44 million EU workers suffer from musculoskeletal abnormalities, which brings the European economy a total of losses estimated at more than 240 billion euros. And these are only EU countries. [
Van der Vorm, Johan; O`Sullivan, Leonard; Nugent, Rachel; de Looze, Michiel. Considerations for developing standards for industrial exoskeletons ].
Reason number 3: technological aspect
Industrial exosuits are much less sensitive to technological constraints typical of the whole exoskeleton industry.
a) Unlike military exoskeletons, intended for field and marching use in conditions of complete energy autonomy, industrial exoskeletons are mostly intended for use in workshops, warehouses, production lines, etc. This reduces the requirements for autonomous energy sources that power the active drive nodes of the exosuits, moreover, due to the availability of power grids, the need for various kinds of batteries and generation systems disappears completely under an hour. This is especially true for hydraulically driven exoskeletons, as avoids the need to place mobile oil stations directly on the exoskeleton case, which in turn removes a number of attendant difficulties.
b) The level of requirements for the control system of an industrial exoskeleton is significantly lower than for a similar solution of medical or military use. On the one hand, the exoskeleton operator is an able-bodied person, which means that he can use technical equipment with “traditional” organs and control interfaces, such as joysticks, touchpads, voice interfaces and others, as a result, he does not need complicated, expensive, and high-tech interface solutions, such as, for example, a neurocomputer interface. On the other hand, the speed and accuracy of responses to a control action in an industrial exoskeleton is not as critical as in a military exoskeleton, because in the conditions of hostilities two to three tenths of a second, delays in feedback can simply cost the operator life. Conditions for the use of industrial exoskeletons are often not as critical.
It should be noted that previous theses should not mislead you: the problems of energy, efficient ergonomic management and safe use are the cornerstones for the entire exoskeleton industry, and industrial exoskeletons are by no means an exception, we are only saying that the level of requirements these technological aspects in this particular case may be significantly lower, which of course also depends on the conditions and specificity of the application.
Industrial Exoskeleton Classification
By design, industrial exoskeletons can be divided into upper or lower body exoskeletons, as well as full-sized exoskeletons.
By the nature of the force impact on the passive (not equipped with drive solutions, support and unloading in such cases is carried out through the use of various kinds of dampers, springs, counterweights, etc.) and active, which in turn can be divided into subgroups depending on the type of drive solutions (electromechanical, hydraulic, pneumatic, combined).
Depending on the structure of the power supply system, active exoskeletons can also be divided into autonomous and non-autonomous.
Depending on their purpose, exoskeleton complexes for work and industry can be divided into
6 categories :
- Exoskeletons for holding the instrument: these exoskeletons consist of a spring-loaded shoulder, a mechanical lever on which the working tool is mounted. The lever is connected to the exoskeleton module of the lower body and the system of counterweights, while the weight of the instrument is transferred to the ground. Most exoskeletons of this type are passive, however there are similar solutions with drives in the lower part.
.
Exoskeleton "Fortis", Lockheed Martin, USA - Chairs without a chair: these are light exoskeletons that can be fixed in the most comfortable position for the operator, which helps to reduce employee fatigue and fatigue during prolonged work in a vertical or just static position (for example, in a half-squat position).
- Exoskeletons to support the back: these exoskeletons can maintain correct posture and reduce the load on the muscles of the back and spine when doing bends and ascents.
Exoskeleton BackX, ExoBionicks, USA - Exotic gloves: mechanized gloves that can help workers firmly hold heavy hand tools. There are also reverse-action devices that help workers who have physiological problems with the natural opening of the palm, unclench their fingers with an exoskeleton glove.
- Full-size exo-costumes: a few years ago it was thought that mainly heavy full-size exo-costumes would be used to solve production problems. Now, most developers have switched to more compact, highly specialized solutions, but the projects of heavy, full-sized exoskeletons continue to evolve now.
Full-size exoskeleton Sarcos Guardium XO, Sarcos Corp., USA - Human-assisted robotic modules: exoskeleton modules that provide the employee with a second pair of hands. Two or more body-mounted robotic arms controlled by the operator are used to hold tools or work pieces in place.
Supernumerary Concept Robotics Limbs, MIT Who today is developing or producing industrial exoskeletons?South KoreaDaewoo Shipbuilding & Marine Engineering
Hyundai Motor Company
USASarcos / raytheon
Lockheed martin
US Bionicks
Ekso Bionics Holdings, Inc.
JapanPanasonic - Activelink
Cyberdine
Honda
Mitsubishi Heavy Industries
FranceGobio robot
New ZealandLaevo
SwitzerlandNoonee AG
IsraelRotbot systems
RussiaExochair
The text was prepared by Albert Efimov and Igor Orlov from the Cberbank Robotics Laboratory.