UAVs are capable of many things: from shooting reports and weddings to monitoring forests in order to quickly respond to fires, and to monitor the status of power grids and oil pipelines. Potentially flying robots can be used indoors, but for this they must be both brisk and powerful enough to interact with the environment. To do this, the Japanese experts created a modular robot DRAGON, which resembles a flying tentacle, which changes shape in order to penetrate small holes and in the future act as a manipulator.
During rescue operations, the robot may need to penetrate the door, and then overcome many other dangerous obstacles - do not hit the wall, cabinet, ficus or person. To solve this problem, you can make a very small robot that would fly into any slot. But he will fit only for observation. You can equip the drone with a protective frame - but such a bulky drone will not be able to interact with the environment very well, that is, it will only help again for search operations. Ideally, the robot should be both small and nimble, but at the same time powerful enough.
In the laboratory of
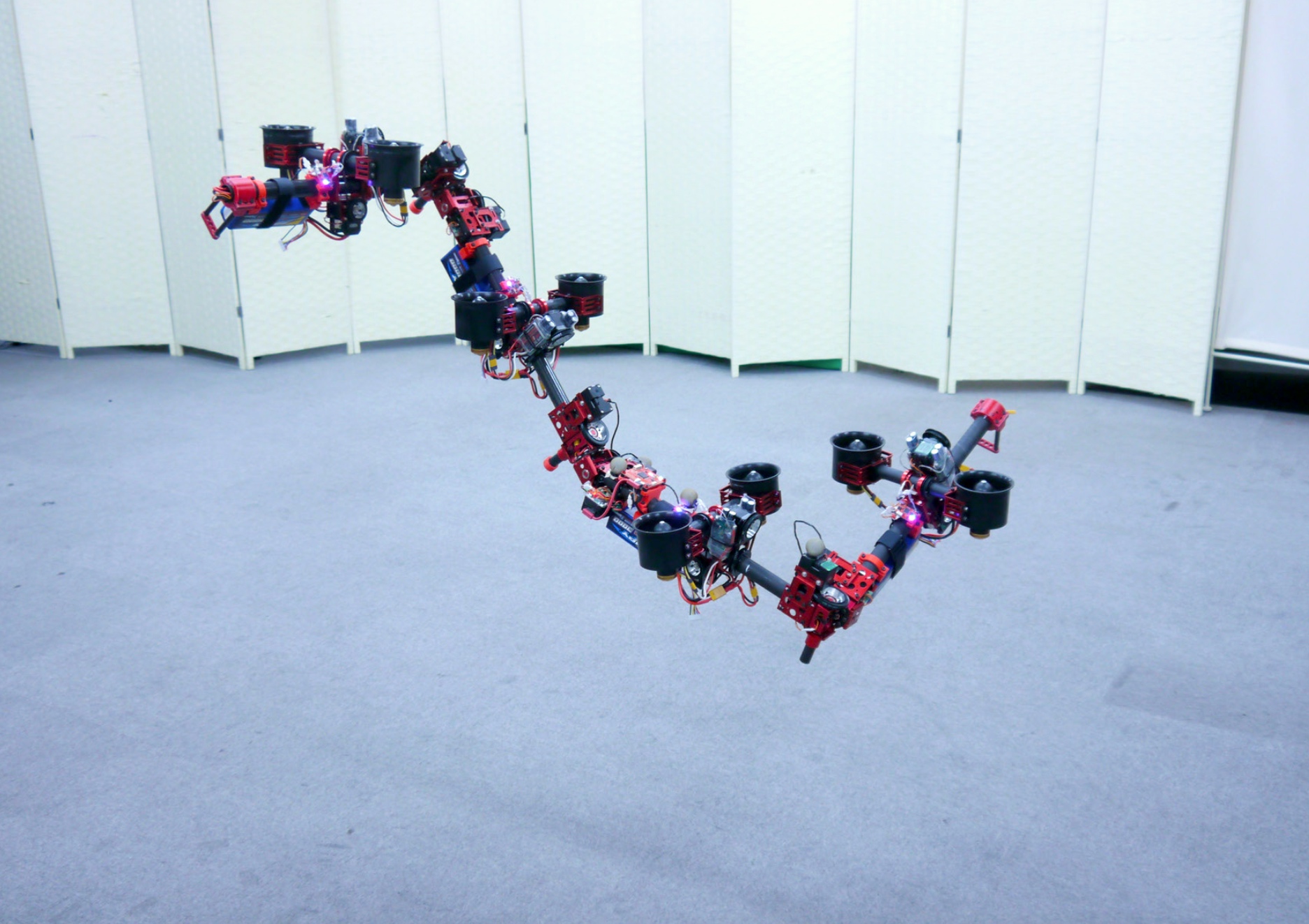
JSK Lab of the University of Tokyo, robotics have created a DRAGON robot, which stands for Dual-rotor embedded aerial transformed with multi-deGree-of-freedom. The modular apparatus on the fly changes shape - from a square copter it is transformed into a thin snake, which allows it to penetrate narrow passages, or take another shape.
DRAGON consists of modules, each of which is equipped with a pair of fans in an annular fairing. Fans change position, forcing the modules to move in different directions, so that the robot can fly in almost any of the forms that allow it to make degrees of freedom. Modules are connected by hinged fasteners. The device is based on the compact computer
Intel Euclid . The battery lasts for three minutes of flight, and scientists will have to work on improving this indicator. It can be assumed that the device will be recorded by cable, but in this case it will lose in maneuverability, or find other autonomous power sources.
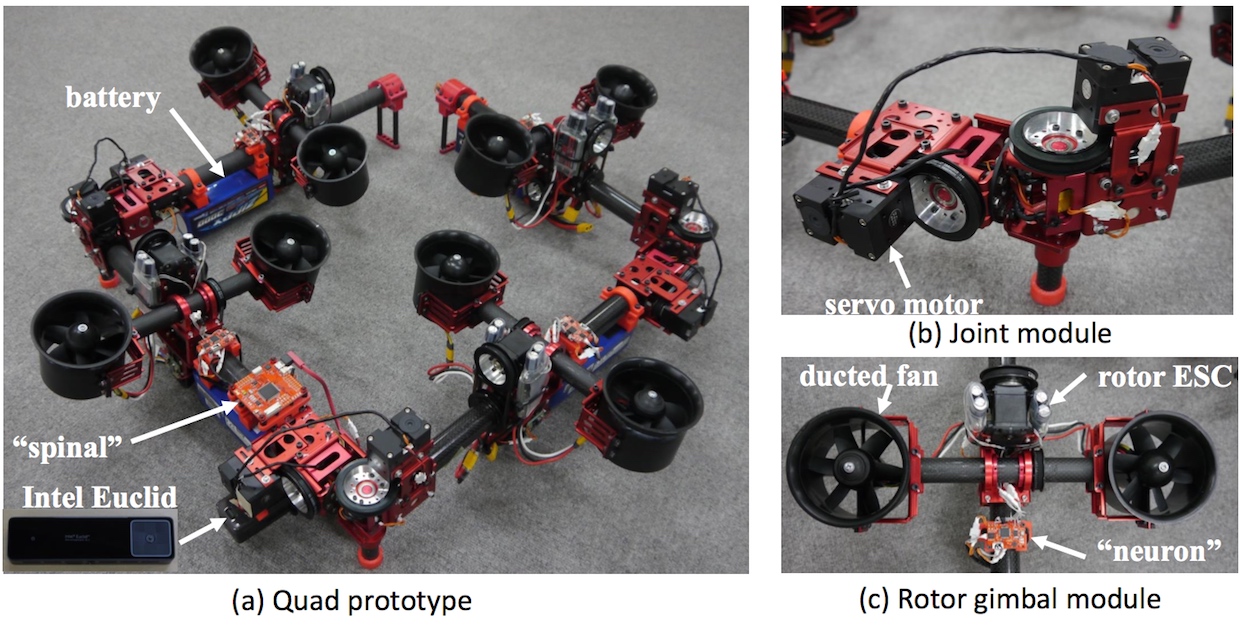
The prototype of four modules, equipped with a total of eight fans. One of the tasks of the developers was to design software that allows the robot to independently decide what form to take in a particular case. In the video, the developers demonstrated how a robot in the form of a snake flies through a small “hatch”.
In the future, the robot will consist of twelve modules, and at the same time will be able to lift objects using extreme modules as a two-finger grip. It can be assumed that such a robot can grasp the object to move it, or otherwise interact with the environment.
Flying robots are used for rescue and monitoring operations. In open spaces, quadrocopters can
throw a lifeline to a drowning person ,
deliver a defibrillator to a person , monitor what is happening in order to find lost people and monitor the terrain during emergency situations for quick response. In the case of enclosed spaces, there are prototypes of snake-like robots - for example, a soft robot from researchers at
Stanford University , which changes size, stretches, bends and embraces objects, rises to a great height, can crawl into very small slots or, for example, under a box up to 100 kilograms to lift it. The soft shell even runs through sharp objects like nails and changes shape - pumps pump air into the case.
The 8-meter
apparatus from Japanese developers at Tohoku University was created to search for people during earthquakes. The robot moves at a speed of up to 10 centimeters per second, "sorting" bristly surface. An early version of this robot was used during the liquidation of the consequences of the
disaster at the Fukushima nuclear power plant , but it was moving mainly in one direction - forward. The new robot turned out more mobile.
There have been attempts to unite flying and snake-like robots.
A quadcopter from scientists at the University of Pennsylvania at the scene delivers two snake-like robots that can move up or down the stairs.
The prototype from the JSK Lab will combine the merits of flying robots with snake-like ones and will interact in various ways with objects, instead of just observing. A member of the JSK laboratory describes DRAGON as “a breakthrough design from the point of view of design” and “an ideal platform for air manipulators”.