Habr, hello!
This article focuses on the development of the I2C (Inter-Integrated Circuit) Linux kernel module. The following describes the process of implementing the basic I2C driver structure, into which you can easily add the implementation of the necessary functionality.
We describe the input data: I2C block for the new processor "wired" on the FPGA, running Linux version 3.18.19 and peripheral devices (EEPROM AT24C64 and BME280).
The principle of operation of I2C is quite simple, but if you need to refresh your knowledge, you can read it
here .
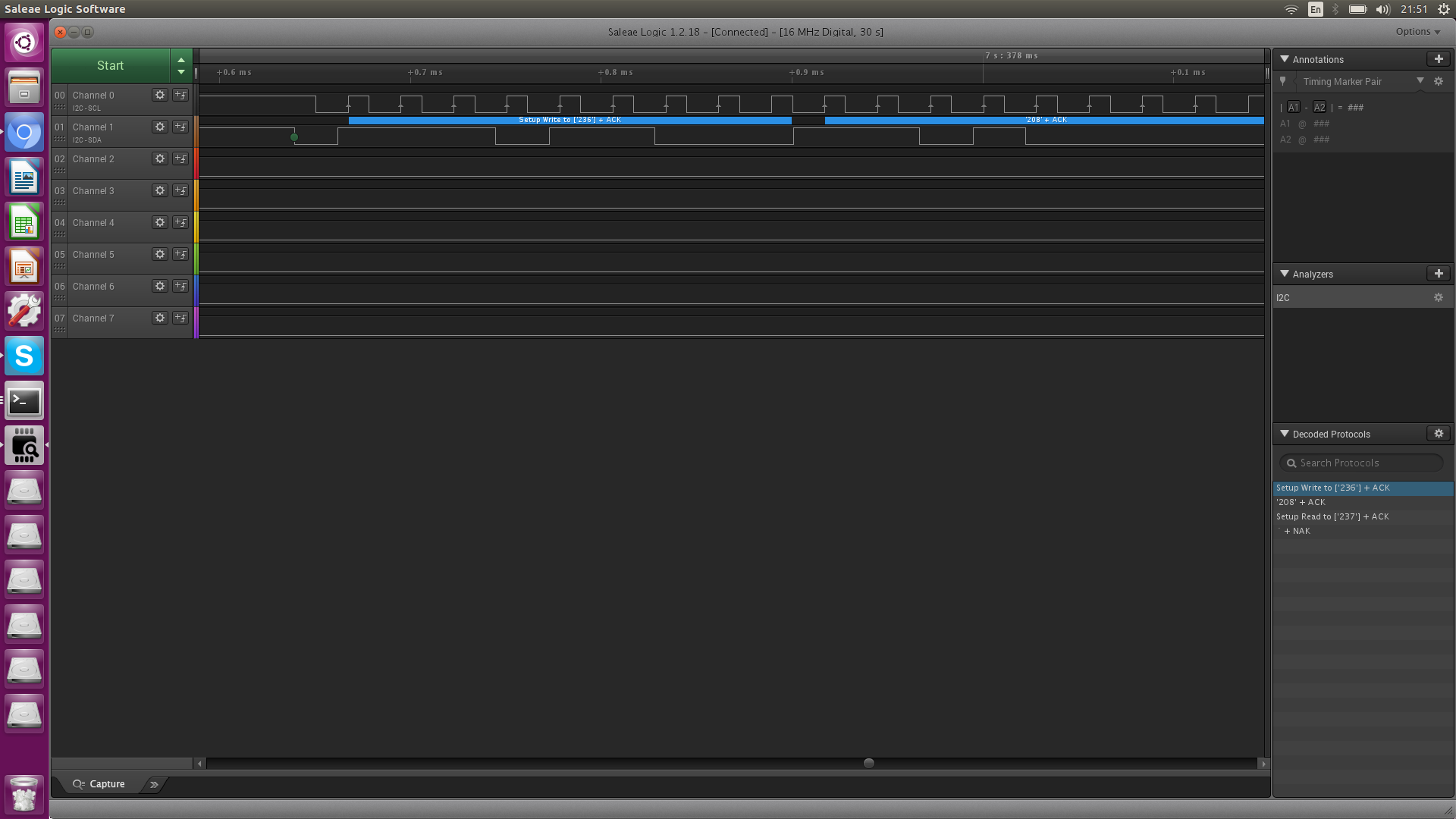 Figure 1. Timing diagram of I2C bus signals
Figure 1. Timing diagram of I2C bus signalsBefore starting to develop a driver, let's see how the user space of the application interacts with the kernel module, for this:
- We implement a small user space application, the purpose of which is to read the unique ID register of the I2C device. This step will allow you to understand the interface through which the exchange takes place between the kernel module and the user application;
- Let's get acquainted with the option of sending I2C messages to the core module;
- Add the kernel module to the assembly and describe the hardware of the devices in the device tree;
- We implement the general structure (skeleton) of the I2C driver with a little explanation.
Unfortunately, it is not possible to attach real source codes of the developed driver. Also, I want to note that all the names, names and the register card of the controller have been changed. The driver’s skeleton does not even include half of the developed functionality, however, the driver structure is a good starting point for development. Examples of I2C drivers can be found
here .
Step one
To get started, get acquainted with the utility i2cdetect. The result of i2cdetect is as follows:
./i2cdetect -y 0 0 1 2 3 4 5 6 7 8 9 abcdef 00: — — — — — — — — — — — — — 10: — — — — — — — — — — — — — — — — 20: — — — — — — — — — — — — — — — — 30: — — — — — — — — — — — — — — — — 40: — — — — — — — — — — — — — — — — 50: 50 — — — — — — — — — — — — — — — 60: — — — — — — — — — — — — — — — — 70: — — — — — — — —
The utility sequentially exposes the device addresses to the I2C bus, and when a positive response is received (in this case, the ACK is positive), displays the device address number on the bus to the console.
Let's write a small program that reads the unique ID of the temperature sensor, and display the result of its work in the console. It looks very simple:
#include <stdio.h> #include <stdlib.h> #include <fcntl.h> #include <sys/ioctl.h> #include <linux/i2c.h> #include <linux/i2c-dev.h> #define I2C_ADAPTER "/dev/i2c-0" int read_buffer(int fd) { struct i2c_rdwr_ioctl_data data; struct i2c_msg messages[2]; unsigned char write_buf[1] = {0xD0}, read_buf[1] = {0x00}; unsigned char write[200]; /* * .addr - () * .flags - (0 - w, 1 - r) * .len - - / * .buf - */ messages[0].addr = 0x50; messages[0].flags = 0; messages[0].len = 1; messages[0].buf = write_buf; messages[1].addr = 0x50; messages[1].flags = 1; messages[1].len = 1; messages[1].buf = read_buf; data.msgs = messages; data.nmsgs = 2; if (ioctl(fd, I2C_RDWR, &data) < 0) printf("Cant send data!\n"); else printf("ID = 0x%x\n", read_buf[0]); } int main(int argc, char **argv) { int fd; /* * Open I2C file descriptor. */ fd = open(I2C_ADAPTER, O_RDWR); if (fd < 0) { printf("Unable to open i2c file\n"); return 0; } read_buffer(fd); return 0; }
It becomes clear that the kernel module accepts data in the form of i2c_rdwr_ioctl_data message fields. The structure contains fields such as i2c_msg and nmsgs, which are used to send:
- .addr - device addresses;
- .flags - type of operation (read or write);
- .len - the length of the current message;
- .buf- clipboard.
Step two
Now, I don’t go deep into the inside, let's get acquainted with one variant of the I2C driver.
As already established, the kernel module receives messages as a structure. For example, consider the algorithm of the driver when performing a write operation (hardware-dependent part):
- First, the TX FIFO is filled: the device address is the first, and after the remaining data is transmitted;
- Clears the ISR interrupt status register and resolves interrupts in the IER register (in this case, the interruption occurs when there is no data in the TX FIFO);
- Data transfer is allowed and the start of bits on the bus is set.
All subsequent data exchange will occur in the interrupt handler.
Drivers that work on this algorithm can be found
here . Also, the controller may not have a FIFO, but only a single register for transmission, but this is a special case with a FIFO size of one.
Step Three
Add the kernel module to the assembly and describe the hardware of the devices in the device tree:
1. Create a source file in the following directory:
cd drivers/i2c/busses/ vim i2c-skel.c :wq
As a result, the file will appear:
drivers/i2c/busses/i2c-skel.c
2. Add driver configuration to
drivers / i2c / busses / Kconfig :
config I2C_SKEL tristate "I2C adapter" help If you say yes to this option, support will be included for the I2C interface.
3. Add
drivers / i2c / busses / Makefile to the assembly:
obj-$(CONFIG_I2C_SKEL) += i2c-skel.o
4. Add a description of the I2C block to the devicetree (* .dts), and also immediately support the eeprom device:
i2c: i2c@f8f01d00 { compatible = "skel,skel-i2c"; #address-cells = <1>; #size-cells = <0>; reg = <0x43c00000 0x100>; interrupt-parent = <&ps7_scugic_0>; interrupts = <0 29 4>; clock-names = "skel-i2c"; clocks = <&clkc 38>; clock-frequency = <100000>; 24c64@50 { compatible = "at,24c64"; pagesize = <32>; reg = <0x50>; }; } ;
Details of the above steps will not be considered, but curious readers can look
here .
Step Four
After acquaintance with the principle of the driver will proceed to the implementation.
First, we connect the header files, describe the “virtual” register card, and also the I2C driver view.
#include <linux/module.h> #include <linux/kernel.h> #include <linux/platform_device.h> #include <linux/i2c.h> #include <linux/io.h> #include <linux/clk.h> #include <linux/interrupt.h> #include <linux/time.h> #include <linux/delay.h> #include <linux/device.h> /* * Registers description. */ #define SKEL_I2C_ID 0x00 /* Core Identifier register */ #define SKEL_I2C_ISR 0x14 /* Interrupt Status Register */ #define SKEL_I2C_ISR_DNE BIT(0) /* One byte transaction done */ #define SKEL_I2C_ISR_ARB BIT(1) /* Arbitration lost */ #define SKEL_I2C_ISR_TXE BIT(2) /* RX FIFO nearly full */ #define SKEL_I2C_ISR_NACK BIT(3) /* No ACK */ #define SKEL_I2C_IER 0x18 /* Interrupt Enable Register */ #define SKEL_I2C_IER_DNE BIT(0) /* Enable DNE IRQ */ #define SKEL_I2C_IER_ARB BIT(1) /* Enable ARB LOSR IRQ */ #define SKEL_I2C_IER_TXE BIT(2) /* Enable TX FIFO EPMTY IRQ */ #define SKEL_I2C_IER_NACK BIT(3) /* Enable NACK IRQ */ #define SKEL_I2C_CTRL 0x1C /* Control Register */ #define SKEL_I2C_CTRL_EN BIT(0) /* Enable I2C controller */ #define SKEL_I2C_CTRL_START BIT(1) /* Send START condition */ #define SKEL_I2C_CTRL_R BIT(2) /* Read command */ #define SKEL_I2C_CTRL_W BIT(3) /* Write command */ #define SKEL_I2C_CTRL_STOP BIT(4) /* Send STOP cindition */ #define SKEL_I2C_TX 0x20 /* TX FIFO */ #define SKEL_I2C_RX 0x24 /* RX FIFO */ #define SKEL_I2C_CLK 0x28 /* Clock Prescale Register*/ #define SKEL_I2C_TIMEOUT 100000 #define SKEL_I2C_XFER_TIMEOUT (msecs_to_jiffies(500)) #define FIFO_SIZE_TX 1024 #define FIFO_SIZE_RX 1024 int presc = -1; module_param(presc, int, S_IRUGO | S_IWUSR); /* * skel_i2c - I2C device context * @base: pointer to register struct * @msg: pointer to current message * @mlen: number of bytes transferred in msg * @dev: device reference * @adap: i2c core abstraction * @msg_complete: xfer completion object * @clk: reference for i2c input clock * @err: error occured * @buf: ptr to msg buffer * @bus_clock: current i2c bus clock rate * @lock: spinlock for IRQ synchronization */ struct skel_i2c { void __iomem *base; struct i2c_msg *msg; size_t mlen; struct device *dev; struct i2c_adapter adap; struct completion msg_complete; struct clk *clk; u32 bus_clock; int err; u32 addr; u8 *buf; spinlock_t lock; };
The main control registers of the controller are:
- Control Register (CTRL) - control register;
- Interrupt Status Register (ISR) - status interrupt register;
- Interrupt Enable Register (IER) - interrupt mask register.
The heart of the driver is the structure skel_i2c, which contains such fields as:
- .base - pointer to the beginning of the register map;
- .msg - pointer to the current message;
- .adap - I2C abstraction (click) .
Let us turn to the more practical part, we describe the types of devices supported by the driver,
I2C adapter functionality and I2C messaging interface:
static const struct of_device_id skel_i2c_match[] = { { .compatible = "skel,skel-i2c", }, { .compatible = "at,24c64", }, {}, }; static u32 skel_i2c_func(struct i2c_adapter *adap) { return I2C_FUNC_I2C | I2C_FUNC_SMBUS_EMUL; } static const struct i2c_algorithm skel_i2c_algo = { .master_xfer = skel_i2c_xfer, .functionality = skel_i2c_func, }; static struct platform_driver skel_i2c_driver = { .probe = skel_i2c_probe, .remove = skel_i2c_remove, .driver = { .name = "skel-i2c", .of_match_table = skel_i2c_match, }, }; module_platform_driver(skel_i2c_driver); MODULE_AUTHOR("Name Surname"); MODULE_DESCRIPTION("I2C bus driver"); MODULE_LICENSE("GPL"); MODULE_ALIAS("platform:skel-i2c");
From the names of the structures and functions, their purpose is obvious, we describe only the main structure of the above:
- skel_i2c_driver - describes the name of the driver, the table of supported devices and functions that are called when the kernel module is loaded or removed from the system.
It is time to register the driver in the system, and thus implement the controller initialization function, and also describe skel_i2c_probe (called when the driver is loaded into the system) and skel_i2c_remove (called when the driver is removed from the system).
static int skel_i2c_init(struct skel_i2c *rdev) { u32 bus_clk_khz = rdev->bus_clock / 1000; u32 clk_khz = clk_get_rate(rdev->clk) / 1000; int prescale; int diff; prescale = clk_khz / (5 * bus_clk_khz) - 1; prescale = clamp(prescale, 0, 0xFFFF); diff = clk_khz / (5 * (prescale 1)) - bus_clk_khz; if (abs(diff) > bus_clk_khz / 10) { dev_err(rdev->dev, "Unsupported clock settings: clk: %d KHz, bus: %d KHz\n", clk_khz, bus_clk_khz); return -EINVAL; } if (presc != -1) i2c_write(presc, rdev->base, SKEL_I2C_CLK); else i2c_write(prescale, rdev->base, SKEL_I2C_CLK); return 0; } static int skel_i2c_probe(struct platform_device *pdev) { struct skel_i2c *rdev = NULL; struct resource *res; int irq, ret; u32 val; rdev = devm_kzalloc(&pdev->dev, sizeof(*rdev), GFP_KERNEL); if (!rdev) return -ENOMEM; res = platform_get_resource(pdev, IORESOURCE_MEM, 0); rdev->base = devm_ioremap_resource(&pdev->dev, res); if (IS_ERR(rdev->base)) return PTR_ERR(rdev->base); irq = platform_get_irq(pdev, 0); if (irq < 0) { dev_err(&pdev->dev, "Missing interrupt resource\n"); return irq; } rdev->clk = devm_clk_get(&pdev->dev, NULL); if (IS_ERR(rdev->clk)) { dev_err(&pdev->dev, "Missing clock\n"); return PTR_ERR(rdev->clk); } rdev->dev = &pdev->dev; init_completion(&rdev->msg_complete); spin_lock_init(&rdev->lock); val = of_property_read_u32(pdev->dev.of_node, "clock-frequency", &rdev->bus_clock); if (val) { dev_err(&pdev->dev, "Default to 100kHz\n"); rdev->bus_clock = 100000; } if (rdev->bus_clock > 400000) { dev_err(&pdev->dev, "Invalid clock-frequency %d\n", rdev->bus_clock); return -EINVAL; } ret = devm_request_irq(&pdev->dev, irq, skel_i2c_isr, 0, pdev->name, rdev); if (ret) { dev_err(&pdev->dev, "Failed to claim IRQ %d\n", irq); return ret; } ret = clk_prepare_enable(rdev->clk); if (ret) { dev_err(&pdev->dev, "Failed to enable clock\n"); return ret; } skel_i2c_init(rdev); i2c_set_adapdata(&rdev->adap, rdev); strlcpy(rdev->adap.name, pdev->name, sizeof(rdev->adap.name)); rdev->adap.owner = THIS_MODULE; rdev->adap.algo = &skel_i2c_algo; rdev->adap.dev.parent = &pdev->dev; rdev->adap.dev.of_node = pdev->dev.of_node; platform_set_drvdata(pdev, rdev); ret = i2c_add_adapter(&rdev->adap); if (ret) { clk_disable_unprepare(rdev->clk); return ret; } dev_info(&pdev->dev, "I2C probe complete\n"); return 0; } static int skel_i2c_remove(struct platform_device *pdev) { struct skel_i2c *rdev = platform_get_drvdata(pdev); clk_disable_unprepare(rdev->clk); i2c_del_adapter(&rdev->adap); return 0; }
The simplest function is skel_i2c_remove, which disables the clock source and frees the memory used. The skel_i2c_init function performs the initial initialization of the I2C controller.
As mentioned earlier, skel_i2c_probe registers a driver in the system. The sequence of actions, conditionally, can be divided into two stages:
- Getting system resources and registering an interrupt handler skel_i2c_isr;
- Filling the structure fields and calling the procedure for adding a new I2C adapter.
After the driver is registered in the system, you can implement the logic of message passing through the interface:
static inline void i2c_write(uint32_t value, void *base, uint32_t addr) { writel(value, base addr); #if defined DEBUG dev_dbg(rdev->dev, "iowrite32(0x%x, base 0x%x);\n", value, addr); #endif } static inline uint32_t i2c_read(void *base, uint32_t addr) { uint32_t reg = readl(base addr); #if defined DEBUG dev_dbg(rdev->dev, "/* ioread32(base 0x%x) == 0x%x */\n", addr, reg); #endif return reg; } static irqreturn_t skel_i2c_isr(int irq, void *dev) { if (unlikely(int_stat & skel_I2C_ISR_ARB)) { } else if (unlikely(int_stat & skel_I2C_ISR_NACK)) { } if (read) fill_rx_fifo(rdev); else fill_tx_fifo(rdev); complete(&rdev->msg_complete); return IRQ_HANDLED; } static int skel_i2c_xfer_msg(struct skel_i2c *rdev, struct i2c_msg *msg) { unsigned long time; rdev->msg = msg; rdev->mlen = msg->len; rdev->addr = msg->addr; rdev->buf = msg->buf; rdev->err = 0; reinit_completion(&rdev->msg_complete); skel_i2c_start_trans(rdev, msg); time = wait_for_completion_timeout(&rdev->msg_complete, skel_I2C_XFER_TIMEOUT); if (time == 0) rdev->err = -ETIMEDOUT; rdev->curr; return rdev->err; } static int skel_i2c_xfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) { struct skel_i2c *rdev = i2c_get_adapdata(adap); int i, ret = 0; for (i = 0; (ret == 0) && (i < num); i) ret = skel_i2c_xfer_msg(rdev, msgs); skel_i2c_snd_stop(rdev); return ret ? : num; }
In the first step, the interaction of the user space of the application with the system kernel module was described. Once we have implemented the inside of the driver it is easy to see the interface through which the exchange takes place. In general, the transfer of messages is as follows:
- skel_i2c_xfer - the function directly receives messages for transmission and successively sends each message to skel_i2c_xfer_msg. If an error occurs during the data transfer, the data transfer is stopped;
- skel_i2c_xfer_msg - the function sets all necessary driver fields and initiates the start of message transfer;
- skel_i2c_isr - interrupt handling procedure. Error handling is performed here, as well as bus data exchange. If all data is sent / received, the done flag is set by calling the complete function, which signals the completion of the message transfer.
The article does not describe some of the subtleties of work. For example, the sequence of actions for the transmission of messages, since the implementation of this algorithm is hardware dependent. We focused on the implementation of the common part of the driver, regardless of the hardware features of the controller.
The complete driver skeleton is attached below. Please, if you find errors / inaccuracies, or you have something to add - write to the PM or in the comments.
Skeleton driver #include <linux/module.h> #include <linux/kernel.h> #include <linux/platform_device.h> #include <linux/i2c.h> #include <linux/io.h> #include <linux/clk.h> #include <linux/interrupt.h> #include <linux/time.h> #include <linux/delay.h> #include <linux/device.h> /* * Registers description. */ #define SKEL_I2C_ID 0x00 /* Core Identifier register */ #define SKEL_I2C_ISR 0x14 /* Interrupt Status Register */ #define SKEL_I2C_ISR_DNE BIT(0) /* One byte transaction done */ #define SKEL_I2C_ISR_ARB BIT(1) /* Arbitration lost */ #define SKEL_I2C_ISR_TXE BIT(2) /* RX FIFO nearly full */ #define SKEL_I2C_ISR_NACK BIT(3) /* No ACK */ #define SKEL_I2C_IER 0x18 /* Interrupt Enable Register */ #define SKEL_I2C_IER_DNE BIT(0) /* Enable DNE IRQ */ #define SKEL_I2C_IER_ARB BIT(1) /* Enable ARB LOSR IRQ */ #define SKEL_I2C_IER_TXE BIT(2) /* Enable TX FIFO EPMTY IRQ */ #define SKEL_I2C_IER_NACK BIT(3) /* Enable NACK IRQ */ #define SKEL_I2C_CTRL 0x1C /* Control Register */ #define SKEL_I2C_CTRL_EN BIT(0) /* Enable I2C controller */ #define SKEL_I2C_CTRL_START BIT(1) /* Send START condition */ #define SKEL_I2C_CTRL_R BIT(2) /* Read command */ #define SKEL_I2C_CTRL_W BIT(3) /* Write command */ #define SKEL_I2C_CTRL_STOP BIT(4) /* Send STOP cindition */ #define SKEL_I2C_TX 0x20 /* TX FIFO */ #define SKEL_I2C_RX 0x24 /* RX FIFO */ #define SKEL_I2C_CLK 0x28 /* Clock Prescale Register*/ #define SKEL_I2C_TIMEOUT 100000 #define SKEL_I2C_XFER_TIMEOUT (msecs_to_jiffies(500)) #define FIFO_SIZE_TX 1024 #define FIFO_SIZE_RX 1024 int presc = -1; module_param(presc, int, S_IRUGO | S_IWUSR); /* * skel_i2c - I2C device context * @base: pointer to register struct * @msg: pointer to current message * @mlen: number of bytes transferred in msg * @dev: device reference * @adap: i2c core abstraction * @msg_complete: xfer completion object * @clk: reference for i2c input clock * @err: error occured * @buf: ptr to msg buffer * @bus_clock: current i2c bus clock rate * @lock: spinlock for IRQ synchronization */ struct skel_i2c { void __iomem *base; struct i2c_msg *msg; size_t mlen; struct device *dev; struct i2c_adapter adap; struct completion msg_complete; struct clk *clk; u32 bus_clock; int err;; u32 addr; u8 *buf; spinlock_t lock; }; static const struct of_device_id skel_i2c_match[] = { { .compatible = "skel,skel-i2c", }, { .compatible = "at,24c64", }, {}, }; static inline void i2c_write(uint32_t value, void *base, uint32_t addr) { writel(value, base + addr); #if defined DEBUG dev_dbg(rdev->dev, "iowrite32(0x%x, base 0x%x);\n", value, addr); #endif } static inline uint32_t i2c_read(void *base, uint32_t addr) { uint32_t reg = readl(base + addr); #if defined DEBUG dev_dbg(rdev->dev, "/* ioread32(base 0x%x) == 0x%x */\n", addr, reg); #endif return reg; } static void skel_i2c_transfer(struct skel_i2c *rdev, u32 data) { i2c_write(data, rdev->base, SKEL_I2C_TX); } static void fill_tx_fifo(struct skel_i2c *rdev) { size_t tx_fifo_avail = FIFO_SIZE_TX; int bytes_to_transfer = min(tx_fifo_avail, rdev->mlen); while (bytes_to_transfer-- > 0) { skel_i2c_transfer(rdev, *rdev->buf); rdev->mlen--; } } static void fill_rx_fifo(struct skel_i2c *rdev) { size_t rx_fifo_avail = FIFO_SIZE_RX; int receive = min(rx_fifo_avail, rdev->mlen); while (receive-- > 0) { *rdev->buf = i2c_read(rdev->base, SKEL_I2C_RX); rdev->mlen--; } } void skel_i2c_snd_stop(struct skel_i2c *rdev) { u32 control = i2c_read(rdev->base, SKEL_I2C_CTRL); i2c_write(control | SKEL_I2C_CTRL_STOP, rdev->base, SKEL_I2C_CTRL); } static irqreturn_t skel_i2c_isr(int irq, void *dev) { struct skel_i2c *rdev = dev; u32 int_stat, read; int_stat = i2c_read(rdev->base, SKEL_I2C_ISR); read = rdev->msg->flags & I2C_M_RD; if (unlikely(int_stat & SKEL_I2C_ISR_ARB)) { } else if (unlikely(int_stat & SKEL_I2C_ISR_NACK)) { } if (read) fill_rx_fifo(rdev); else fill_tx_fifo(rdev); complete(&rdev->msg_complete); return IRQ_HANDLED; } static void skel_i2c_start_trans(struct skel_i2c *rdev, struct i2c_msg *msg) { } static int skel_i2c_xfer_msg(struct skel_i2c *rdev, struct i2c_msg *msg) { unsigned long time; rdev->msg = msg; rdev->mlen = msg->len; rdev->addr = msg->addr; rdev->buf = msg->buf; rdev->err = 0; reinit_completion(&rdev->msg_complete); skel_i2c_start_trans(rdev, msg); time = wait_for_completion_timeout(&rdev->msg_complete, SKEL_I2C_XFER_TIMEOUT); if (time == 0) rdev->err = -ETIMEDOUT; return rdev->err; } static int skel_i2c_init(struct skel_i2c *rdev) { u32 bus_clk_khz = rdev->bus_clock / 1000; u32 clk_khz = clk_get_rate(rdev->clk) / 1000; int prescale; int diff; prescale = clk_khz / (5 * bus_clk_khz) - 1; prescale = clamp(prescale, 0, 0xFFFF); diff = clk_khz / (5 * (prescale - 1)) - bus_clk_khz; if (abs(diff) > bus_clk_khz / 10) { dev_err(rdev->dev, "Unsupported clock settings: clk: %d KHz, bus: %d KHz\n", clk_khz, bus_clk_khz); return -EINVAL; } if (presc != -1) i2c_write(presc, rdev->base, SKEL_I2C_CLK); else i2c_write(prescale, rdev->base, SKEL_I2C_CLK); return 0; } static int skel_i2c_xfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) { struct skel_i2c *rdev = i2c_get_adapdata(adap); int i, ret = 0; for (i = 0; (ret == 0) && (i < num); i++) ret = skel_i2c_xfer_msg(rdev, msgs); skel_i2c_snd_stop(rdev); return ret ? : num; } static u32 skel_i2c_func(struct i2c_adapter *adap) { return I2C_FUNC_I2C | I2C_FUNC_SMBUS_EMUL; } static const struct i2c_algorithm skel_i2c_algo = { .master_xfer = skel_i2c_xfer, .functionality = skel_i2c_func, }; static int skel_i2c_probe(struct platform_device *pdev) { struct skel_i2c *rdev = NULL; struct resource *res; int irq, ret; u32 val; rdev = devm_kzalloc(&pdev->dev, sizeof(*rdev), GFP_KERNEL); if (!rdev) return -ENOMEM; res = platform_get_resource(pdev, IORESOURCE_MEM, 0); rdev->base = devm_ioremap_resource(&pdev->dev, res); if (IS_ERR(rdev->base)) return PTR_ERR(rdev->base); irq = platform_get_irq(pdev, 0); if (irq < 0) { dev_err(&pdev->dev, "Missing interrupt resource\n"); return irq; } rdev->clk = devm_clk_get(&pdev->dev, NULL); if (IS_ERR(rdev->clk)) { dev_err(&pdev->dev, "Missing clock\n"); return PTR_ERR(rdev->clk); } rdev->dev = &pdev->dev; init_completion(&rdev->msg_complete); spin_lock_init(&rdev->lock); val = of_property_read_u32(pdev->dev.of_node, "clock-frequency", &rdev->bus_clock); if (val) { dev_err(&pdev->dev, "Default to 100kHz\n"); rdev->bus_clock = 100000; /* default clock rate */ } if (rdev->bus_clock > 400000) { dev_err(&pdev->dev, "Invalid clock-frequency %d\n", rdev->bus_clock); return -EINVAL; } ret = devm_request_irq(&pdev->dev, irq, skel_i2c_isr, 0, pdev->name, rdev); if (ret) { dev_err(&pdev->dev, "Failed to claim IRQ %d\n", irq); return ret; } ret = clk_prepare_enable(rdev->clk); if (ret) { dev_err(&pdev->dev, "Failed to enable clock\n"); return ret; } skel_i2c_init(rdev); i2c_set_adapdata(&rdev->adap, rdev); strlcpy(rdev->adap.name, pdev->name, sizeof(rdev->adap.name)); rdev->adap.owner = THIS_MODULE; rdev->adap.algo = &skel_i2c_algo; rdev->adap.dev.parent = &pdev->dev; rdev->adap.dev.of_node = pdev->dev.of_node; platform_set_drvdata(pdev, rdev); ret = i2c_add_adapter(&rdev->adap); if (ret) { clk_disable_unprepare(rdev->clk); return ret; } dev_info(&pdev->dev, "I2C probe complete\n"); return 0; } static int skel_i2c_remove(struct platform_device *pdev) { struct skel_i2c *rdev = platform_get_drvdata(pdev); clk_disable_unprepare(rdev->clk); i2c_del_adapter(&rdev->adap); return 0; } static struct platform_driver skel_i2c_driver = { .probe = skel_i2c_probe, .remove = skel_i2c_remove, .driver = { .name = "skel-i2c", .of_match_table = skel_i2c_match, }, }; module_platform_driver(skel_i2c_driver); MODULE_AUTHOR("Name Surname"); MODULE_DESCRIPTION("I2C bus driver"); MODULE_LICENSE("GPL"); MODULE_ALIAS("platform:skel-i2c");
Thank you for your attention!