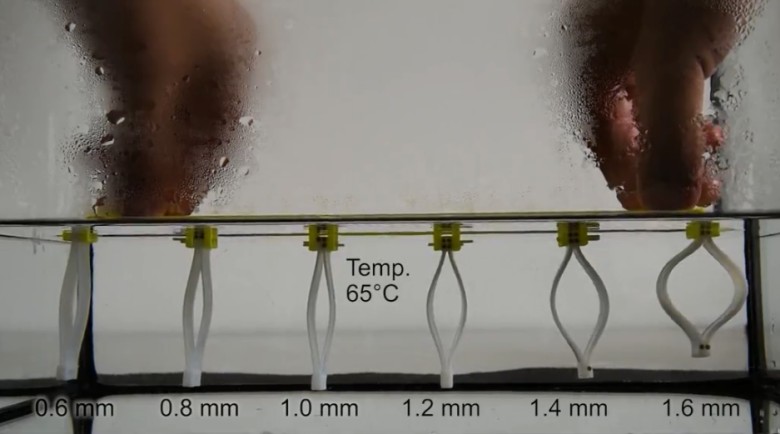
 The response of the flexible polymer bands to temperature changes depends on their thickness. Shown here are bands from 0.6 mm to 1.6 mm when placed in water at 65 ° C. Straightening speed varies from 7 to 37 seconds, which allows you to program the actions of the robot in a certain sequence
The response of the flexible polymer bands to temperature changes depends on their thickness. Shown here are bands from 0.6 mm to 1.6 mm when placed in water at 65 ° C. Straightening speed varies from 7 to 37 seconds, which allows you to program the actions of the robot in a certain sequenceEngineers at Caltech and colleagues at Zurich Swiss High School
have created robots that can move independently without the use of any engines, servo drives, or power sources. Looks like a perpetual motion machine? Not really. The fact is that each pair of oars or “muscles” is capable of only
one movement by oars after the robot is lowered into the water. But the highlight is that there can be as many muscles and oars as possible - and they can be triggered at different intervals of time one after another. Thus, it is possible to
program in advance
the trajectory of the robot, as well as the performance of various actions by it - for example, the discharge of cargo with the consequent evasion maneuver. The scientific work was funded by the research unit of the US Army (Army Research Office).
Despite its apparent simplicity, these are the first of its kind devices, which, for programmed actions in water, use the deformation of the material as the temperature changes. The principle of operation is shown in the
demonstration videos .
List of demo video
- One stroke . The distance traveled from one stroke approximately corresponds to 1.15 the length of the robot.
- The reaction of the "muscles" to temperature changes depends on the thickness of the flexible polymer bands. The video shows the strip thickness from 0.6 mm to 1.6 mm when placed in water of 65 ° C. Straightening speed varies from 7 to 37 seconds.
- The movement of the robot rower with two pairs of oars . The sequence of strokes is regulated by the thickness of the muscles in the first and second pairs of oars. The distance traveled from the double stroke approximately corresponds to 1.9 of the length of the robot.
- Drive with a left turn . The first pair of oars moves the robot forward by about 0.5 of its hull, and the paddle from the second turn rotates the hull by approximately 21.45 °.
- Movement with two turns . After the first stroke, the robot turns left approximately 21.64 °, and after the second stroke turns right approximately 21.45 °.
- Muscles from another material , which are straightened at a different temperature of 40 ° C. The video shows that the previous material does not respond to this temperature. Thus, scientists can program the robot for various movements depending on the ambient temperature.
- An example of a complex algorithm . The robot swims the set distance, drops the load, and then swims in the opposite direction. The first condition is provided by thinner polymer strips that are triggered earlier. The securing of the load is ensured by thick stripes that react later and release the load after the robot has sailed the programmed distance.
- The internal mechanism of the actuator shows how the muscle presses and transfers the bistable mechanism from one equilibrium state to another.
According to the developers, this research in some sense “blurs the boundary between materials and robots”, because in the device the material itself functions as a machine: “Our examples show that we can use structured materials that are deformed in response to environmental signals to control and robots, ”
says Chiara Daraio, a professor of mechanical engineering and applied physics in the engineering and applied sciences department of the California Institute of Technology, one of the authors of a scientific article.
The robot is driven by bands of flexible polymer, which shrinks when cold and stretches when heated. The polymer is positioned so as to activate a bistable switch in the body of the robot, which in turn is attached to a moving element, for example, to a paddle for a forward stroke.
The study is based on
previous scientific work on the circuits of bistable elements for transmitting signals and designing logic gates of a programmable machine.
In addition to temperature, the robot can be programmed to perform actions depending on other conditions — for example, to trigger a change in the acidity of the medium.
The scientific article was
published on May 15, 2018 in the journal
Proceedings of the United States of America (doi: 10.1073 / pnas.1800386115,
pdf ).