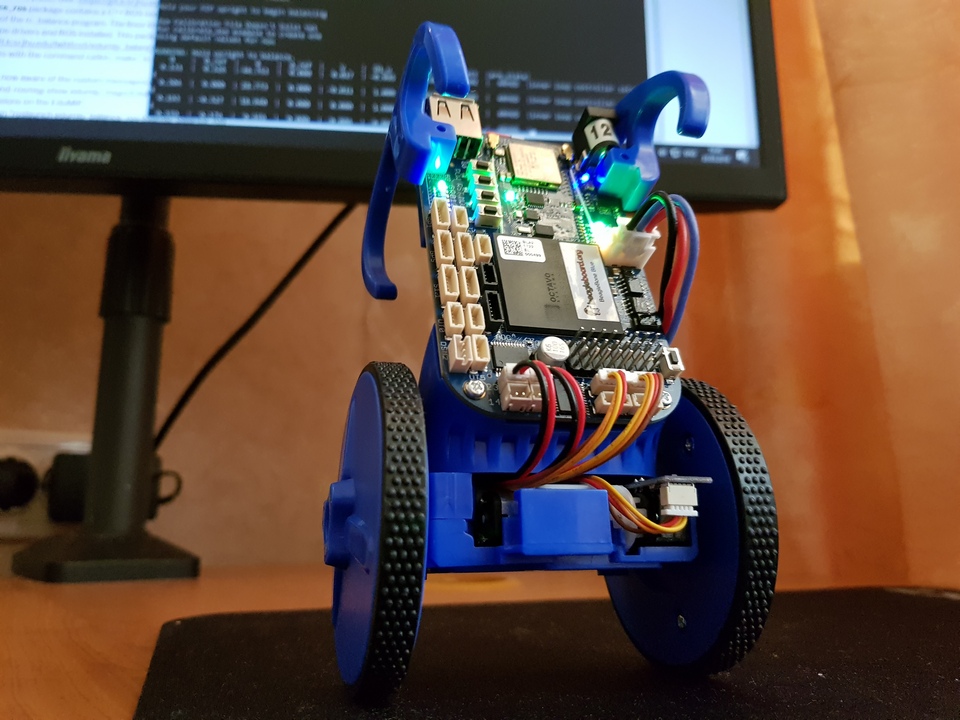
The robot can keep the balance on two wheels, a pretty smart ride. On board a full linux, there is wifi. You can program through the web interface. There are instructions and sources for running ROS on it. In general, a lot of opportunities for creativity.
I have long wanted to play around with a robot with a gyroscope, an accelerometer, a compass and learn about ROS. I didn’t want to solder and make anything like before. And here BeagleBone has one paid computer with an integrated expansion card for the BeagleBone Blue robots, which has the necessary sensors and engine drivers. After some time, a kit for assembling the EduMip robot in the states was finalized for it and they wrote instructions on how to launch ROS with the source code on it. In general, I fired up.
What is included:
- wheelbase with motors / gearboxes / wheels / encoders / wires
- 2-cell 1400 mAh LiPo
- 12 volt charger
- BeagleBone Blue
EduMIP was created in the UC SAN DIEGO COORDINATED ROBOTICS LAB robotics laboratory. Used in online courses, universities and circles of robotics.
EduMIP is a learning platform:
- Dynamic modeling and feedback control of unstable systems.
- Robot motion planning and collision avoidance.
- DC motor control via H-bridges and encoders.
- Orientation assessment via IMU and Barometer.
- Communication over WiFi (802.11 b / g / n) and Bluetooth (4.1 / BLE).
- Charging, balancing, protecting, and monitoring a (included) Lipo 2 cell battery.
- Multi-threaded, event-oriented C programming in Debian Linux.
EduMIP is compatible with Python, ROS, MATLAB & Simulink, and LabVIEW.
The EduMip chassis was developed in collaboration with WowWee.
EduMIP is easy to expand using 3D printing, there is an extensive software library for millions of standard sensors and communication devices by: USB, I2C, SPI, CAN, UART (GPS, DSM2), PWM (servos, ESCs), GPIO, ADC.
All the same, I had to buy another soldering iron to solder the wires to the motors, for this money you could immediately solder. The rest of the kit is quite high quality and well packaged.
Gathered in one evening. Motors and wheels in my opinion slack. I am glad that you did not need to practically solder, all the electronics on one board. The battery is charged through the board, from the script you can see the battery voltage.
The undoubted advantage for me is that wifi and full linux are built in to BedgleBone. Immediately stands Cloud9 IDE and you can program the robot in the air in python and other programming languages. The board has 4GB of memory on which Linux Debian is already written, so you can start and program it without a flash drive. Only for ROS, you need to write the image to the memory card.
In the next part I’ll analyze how to program it, while I’m stuck on how to install additional libraries from this robot in Debian.