Robotics circles in our time definitely enjoy success. Lego, arduino, scratches and much more are still available to modern children (I’m sure many, like me, are jealous of this kids in this regard). Being a teacher of robotics, I decided to share some material that I had accumulated in a couple of years of work, namely, a fairly simple robot and several classes with it.
These units are used by me in the classroom in order to explain to children the principles of operation of the motor driver, line sensor and range finder. Children who have been overtaken by the study of this robot have already been taught for a year already and have minimal ideas about Arduino, motors and electrical engineering in general. There are many projects on the Internet with these components, but two things motivated me to develop my typewriter - I wanted to use the compartment for 4 AA batteries and be able to securely attach almost any sensor to the robot (there are several additional mounting holes in the design).

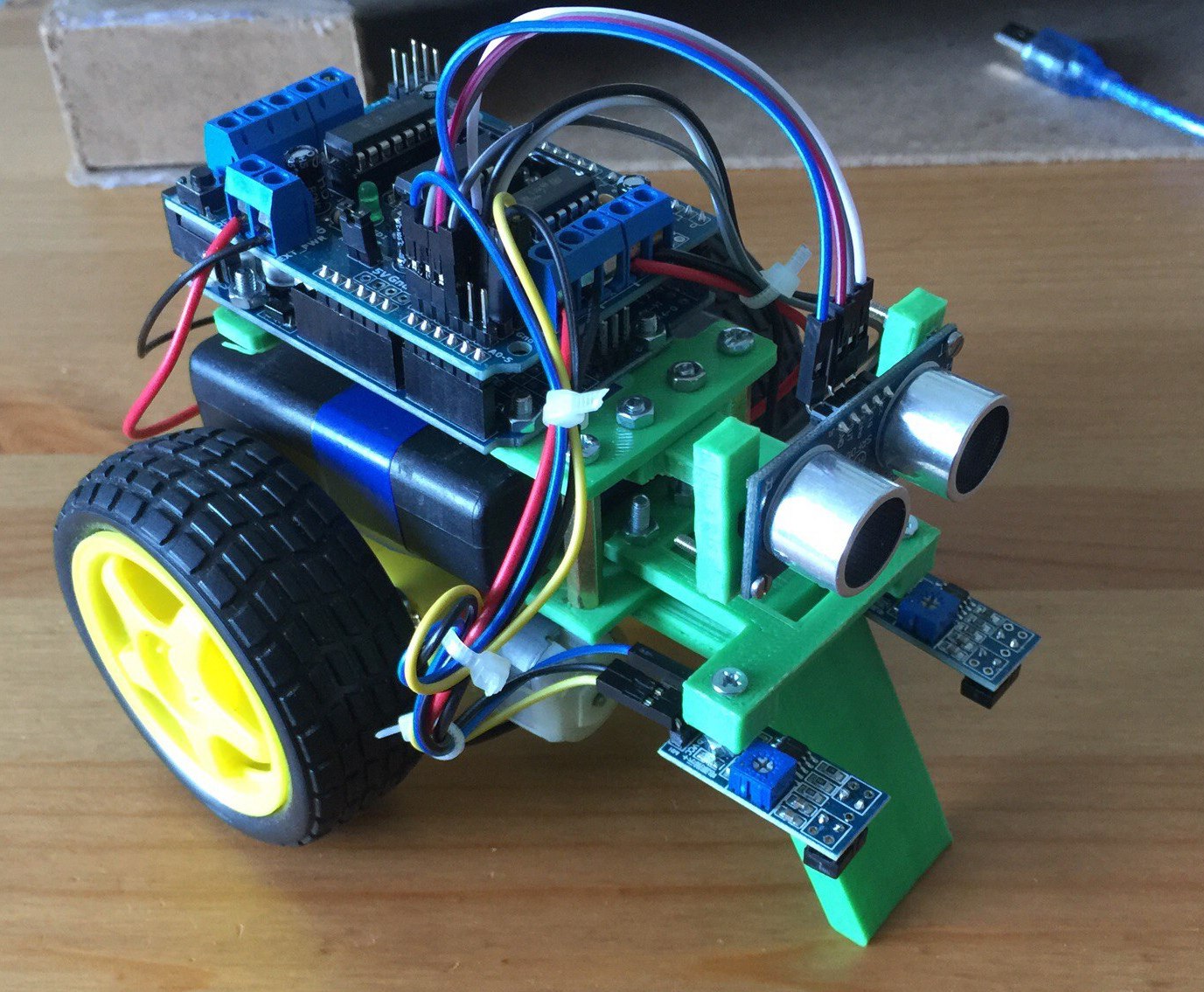
The robot is controlled by an Arduino Uno motherboard with a motor shield l293d, from sensors I put a range finder HC-SR04 and two tcrt5000 line sensors (it has both digital and analog output).
The body of the robot consists of 3 parts (not counting the optional mounting for sensors), which are printed on a 3D printer. For the assembly, you need M3 fasteners, I described all the necessary elements in the document with the files for the 3D printer.
The robot is programmed, as in the standard Arduino IDE (older children), and in the miniBloq program (for younger groups). For the standard environment, the AFMotor library is used, which is necessary for working with the engine driver's shield. In miniBloq, to work, you need to select in the section the hardware of the “ta-bot v1” robot, which uses a similar driver.
Having a range finder and line sensors on board, the robot is suitable for participation in competitions in many disciplines, but it was created just for training, and it won’t work to win prizes.
Classes that can be held with him:
- Work with the driver of engines. The rotation of the wheel in different directions and at different speeds.
- Simple maneuvers. Riding in a circle, riding around the eight (in these classes, as a rule, you have to select the necessary time and speed many times to get a given figure).
- Sensor line. Principle of operation. Transferring sensor readings to a computer (port monitor).
- Driving on line with one line sensor.
- Driving on line with two line sensors.
- Rangefinder. The principle of the rangefinder. Transfer the rangefinder readings to a computer.
- Riding around the room with a range finder. The robot goes forward to the meeting with an obstacle, as soon as it approaches the wall - it turns.
- Search for the enemy (as in the robot sum). Two robots are placed in a circle and begin to spin in place, looking for the enemy's rangefinder.
In the folder with the details you can also find several ready-made activities from the above list.