BigDog became the first Boston Dynamics robot to be widely known. In many ways, it was he who “made the name” of his creator company. The robot for the military, which was abandoned by the military, and the first robot, Boston Dynamics, which the developers kicked at the camera.
Now the project has been rejected, but it has become the basis for the company's further development, Cheetah and the new Spot, videos with which quickly became viral.
Today we will try to understand the BigDog device from the words of its developers. The authors published the original article back in 2008, but so far (it seems like) has not been translated into Russian. It tells about the main components of the robot and the algorithms that coordinate its gait. The goal of the BigDog project is to create autonomous devices with legs with the possibility of movement over rough terrain. They must be superior to existing wheeled and tracked vehicles. An ideal system should go wherever a person or animal can go, run for hours, and carry weight in the form of its own fuel and payload. She is smart enough to cross the terrain with minimal human intervention and control.
Created by BigDog robots helped to take several steps to achieve these goals, although there is still a lot of work ahead.
The BigDog has onboard systems that provide power, actuation, environmental data collection, monitoring and communication. Power is supplied by a water-cooled two-stroke engine, which provides about 15 hp. It drives a pump that delivers hydraulic oil through a system of filters, manifolds, batteries to the actuators of the robotic legs. The actuators are low-friction hydraulic cylinders, adjustable by two-stage servo valves. Each actuator has sensors that control the position of the joint and force. Each leg has 4 hydraulic actuators that feed the joints. A BigDog heat exchanger cools the oil and the radiator cools the engine for sustained operations.
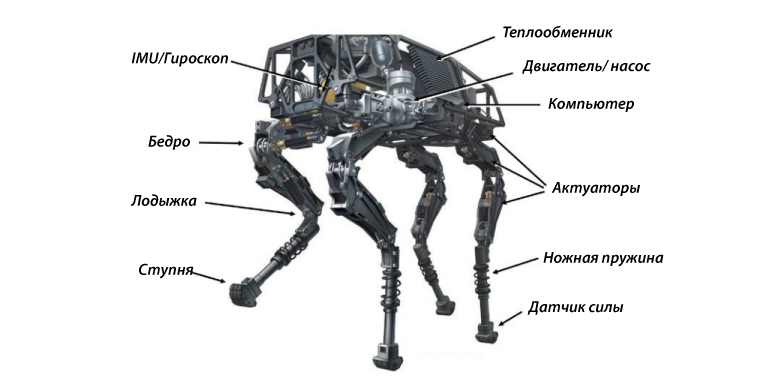 The main elements of the design BigDog
The main elements of the design BigDogThe on-board computer controls the behavior of BigDog, controls the sensors, and is responsible for communication with the remote operator. It also records a large amount of engineering data for performance analysis, error analysis and operational support.
BigDog has about 50 sensors. Inertial sensors measure the position and acceleration of the body, sensors of the joints measure the movement and strength of the articular actuators. The on-board computer processes information from all of these sensors in order to assess how the robot moves. Another group of sensors controls BigDog homeostasis: hydraulic pressure, flows and temperature, engine speed, etc.
The on-board computer performs both low- and high-level monitoring functions. The low-level system controls the position of the servos and the nutrition in the joints. High-level coordinates the position of the legs to regulate the speed, position and height of the body during movement. It also tracks the power of interaction with the earth to ensure sustainable movement.
BigDog has many options for movement. He can get up, crouch, crawl, walk, lifting only one leg at a time, walking at a trot and gallop. The speed during a crawling walk is 0.2 m / s, for a lynx - 1.6 m / s, for running - 2 m / s (in laboratory conditions, the maximum rate of speed was 3.1 m / s). In addition, the robot can jump 1.1 meters.
BigDog is usually controlled by a human operator who works with the control unit connected to the robot via IP radio receivers. The operator performs high-level motion and speed control. He can also order the robot to start or stop the engine, get up, sit down, walk or go to a run.
[You can read about how the autonomous navigation algorithm for the robot was developed here ]In the robot integrated stereo vision system and lidar. The stereo vision system developed by Jet Propulsion Laboratory consists of a pair of stereo cameras, a computer, and visual software. It is used to obtain a 3D shape of the landscape in front of the robot and find their path. Lidar is needed so that BigDog can follow a person without additional operator commands.
Gait control
To move with the speed of a person, BigDog uses a dynamically balanced trot. It balances using lateral velocity and acceleration, determined by the perceived behavior of the legs in combination with inertia sensors.
The BigDog control system coordinates the kinematics and ground reactions of the robot, reacting to the main postural commands. The controller distributes the load between the legs in order to optimize their load carrying capacity. The vertical load on the limbs is kept as even as possible, and individual legs generate ground reactions directed at the hips to reduce friction.
The gait coordination algorithm responsible for communication between the limbs triggers the movement of the legs. He is coordinated by a virtual foot model. The general scheme of control of walking BigDog can be represented as follows:
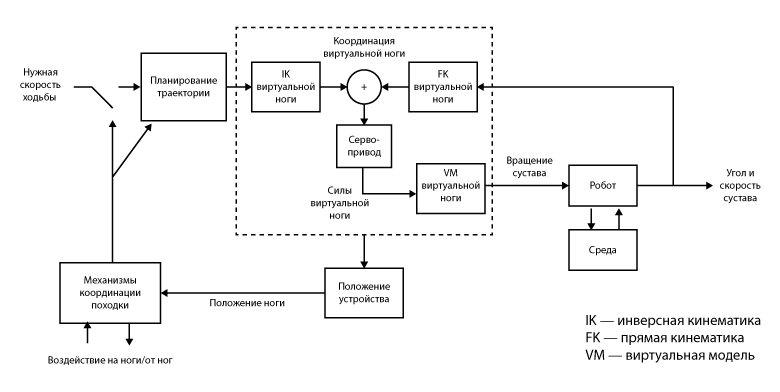 BigDog walk control circuit
BigDog walk control circuitWe developed walking algorithms for rough terrain and tested them in physical modeling before testing on a robot. The simulated robot walks on slopes at an angle of up to 60 degrees. The algorithm of its movement varies depending on whether it goes on a flat surface or on a slope. In addition, it takes into account unexpected obstacles in the way, such as stones or pits.
Physical modeling was used to develop gait algorithms.The control system uses information from the articular sensor to determine whether the "legs" are currently on the ground and determine the load on each limb and drive. The state algorithm controls the position of the body, coordinating the kinematics of the limbs with the reaction forces of the legs in contact with the ground. The state algorithm implements the correct movement of the legs on an uneven surface. This allows you to control the turns, pitch and height of the body relative to the ground, thereby enabling BigDog to adapt to changes in the landscape without sensors of a higher level of perception of the terrain.
BigDog adapts to the terrain in two ways. It regulates the height and attitude of the body to the landscape and controls where to put the legs. When climbing and descending from the slopes, the body of the robot bends down. Steep slopes (more than 45 degrees), the robot overcomes, adjusting the gait and using smaller steps.
At the end of the article, the authors thank all 23 people from the BigDog team by name and share plans for the future: to strengthen the body of the robot, make BigDog autonomous and make it work quieter (the gasoline engine roars like a motorcycle). The last point, as time has shown, remains a serious problem.More about robotics at robo-hunter.com: